机场高空瞭望系统是机场对飞机起降过程进行观察、监视和跟踪的重要设备,目前发达国家已普遍装备使用本类设备,以达到监控机场起降状况、及时清除安全隐患、保证航空安全的目的。随着国内外反恐形势的不断变化,更突显出对该类设备的迫切需求。深圳华瑞通研制的系统具有全天候、跟踪速度快、覆盖面广、作用距离远、图像稳定、高清晰的特点,能为飞机起降、安全控制提供装备技术上的强力支持。
机场高空瞭望系统是针对跟踪监视飞机起降过程需要而设计的图像稳定综合处理系统,它集成了多种高性能成像系统和精密伺服控制系统。该系统的指向器安装在机场的跑道起降端,显控台安装在控制室内。系统组合采用高性能高清摄像系统进行观察、搜索监视、跟踪目标,能高效的发现、识别和确认目标。
系统功能规划图:

本次无人飞机起降光电跟踪监控系统,就是采用了先进的陀螺稳定技术和计算机图像处理及控制技术,能有效地高速锁定目标。该系统可以根据用户的要求,灵活选配多种规格的光学镜头、高清摄像机、红外热像仪等。系统具有如下特点:
1) 采用高端图像传感器和智能图像处理模块,显著提高产品性能;
2) 可以组合使用多种主被动光学传感器,无论是在晴朗的白天、漆黑的夜间、能见度不佳的雾天,都能有效发现、捕获目标;
3) 采用先进的智能图像处理技术、自动小目标动态跟踪技术,图像稳定清晰;
4) 采用标准化、模块化设计技术,扩展性好,维修方便;
5) 采用“三防”、密封设计技术,利于恶劣环境长期使用;
6) 采用了先进的陀螺伺服稳定技术,有效隔离强风引起的摇摆。
7) 全中文控制界面,操作直观方便。
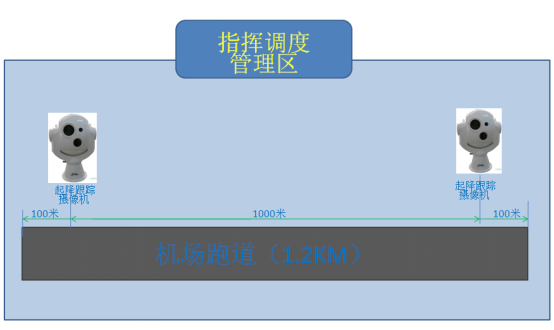
在机场跑道两端安装飞机起降安全跟踪监控-光电智能跟踪监控摄像机系统,对飞机起降全程进行跟踪监控,同时机场雷达联动,在飞机起降过程中出现偏离航线时,系统自动识别并发出预警信号,可与飞机导航系统联动,在预警后系统自动提示正确航线轨迹,修正导航设施,让飞机重新回归到正确航线;以加强飞机起降的安全管理。
规划图如下:
机场起降跟踪系统的主要功能如下:
1)通过机场安装的高精光学镜头,对机场跑道空域进行24小时成像,实时监控机场飞机起降状况;第三代高精度智能控制板采用对焦深度自适应快速对焦算法,实现超大视场自适应快速对焦,该算法在保持调焦精度的前提下,能够在大视场内快速聚焦,实现平均对焦时间小于0.5S,一次性对焦成功率高达95%。
在机场指挥中心采用智能跟踪监视软件,与机场雷达联动后实现对飞机的起降过程实时自动追踪;
2)在飞机起降航线两侧设置警戒线,当飞机偏离航线越过警戒线时,系统自动识别并发出报警信号;
3)系统通过传输设备将前端视频信号和数据信号接入机场指挥中心,供突发事件的指挥决策提供参考;
4)实时记录周边的视频图像资料,为现场情况的事后回现提供丰富的资料。
昼夜成像功能
可见光成像系统的彩色模式非常适合天气晴朗、能见度良好的状况下的观察监视识别;黑白模式则具有较高的视频分辨率和低照度成像能力
具有手动搜索、捕获和自动跟踪目标的功能
该系统操作十分方便。通过手动操纵单杆可以在不同的转速下对空中目标进行搜索、观察和监视,对需要监视的目标可转入自动跟踪状态。
具有良好的视轴稳定功能
光电指向器采用球形结构,具有风阻小,抗风能力强的优点;采用陀螺稳定系统能够有效地隔离因强风造成的安装平台摇摆,从而保持光电摄像系统的稳定,得到清晰、稳定的图像,而且保证目标图像始终在电视屏幕上而不丢失。
具有目标手动、自动跟踪锁定功能
采用先进的图像处理和识别技术、目标自动跟踪技术,使要求跟踪的目标保持在电视视场中心。
具有雷达引导跟踪功能
通过接入雷达系统的引导信号实现雷达与光电的联动,充分发挥雷达作用距离远、光电系统成像直观的优点,及时捕捉到目标。
具有偏离航线预警功能
A. 水平方向航线预警
Ⅰ.雷达联动预警:该方式预警率为100%;采用视频图像与机场雷达联动,利用雷达的空管性能,当飞机在起降过程中将雷达探测到的信号提供给终端平台,系统平台通过内置算法,通过计算自动将雷达提供的经纬度数据转化成云台角度值,对飞机进行锁定跟踪监控,当飞机在起降过程中出现偏离航线的情况时,后发出告警信息给云台控制系统,云台接收到信息后锁定报警飞机,视频图像重点监控该飞机,并发出预警信号给后台管理平台,在监控中心管理软件中弹出报警界面,显示报警飞机的重要视频信息。
Ⅱ.视觉分析预警:如果飞机进入跑道上空后水平方向的飞行线路为直线状态,即以跑道宽度对应到空中位置上去区域的直线,可利用视频图像分析系统,在跑道上空对应航道两侧外围各设置一道虚拟警戒线,当飞机在起降过程中偏离航线,跨越警戒线时,视频图像分析系统设备产生一个触发报警信号给终端管理系统,在管理监控中心管理软件平台中弹出报警飞机画面窗口,实现偏离航线报警功能。
B.垂直方向航线预警
对系统软件做二次开发,将飞机起降时垂直方向航线轨迹数据编辑到系统软件中,在系统软件中预先设计出一条标准轨迹路线数据库。监控系统与雷达监测系统联动跟踪,飞机在起飞\降落过程中,根据雷达提供的飞机在空间点对应的实时数据值(飞机空间坐标经纬度)系统自动测绘出一条当前运动轨迹,该轨迹与系统数据库轨迹路线进行对比,当发现偏离时,系统自动做出判断并发出预警信息;从而实现垂直方向偏离航线的监控跟踪自动识别预警功能。
如图中所示,整个飞机起飞的全程跟踪监控:

系统组成
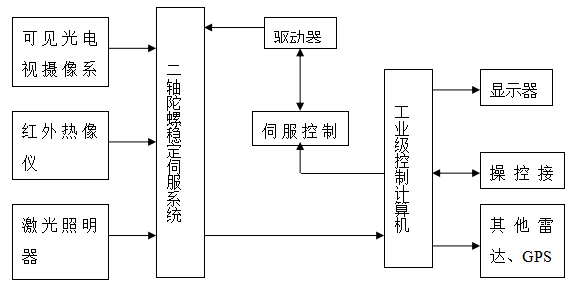
系统主要由安装于室外的指向器、现场控制柜和安装于指挥中心的显控设备三部分组成,现场控制柜和显控设备之间采用光纤/电缆连接。
室外指向器 可集成高性能可见光摄像传感器、红外热像仪、激光照明器、两轴转台、陀螺伺服稳定系统等部分组成。
1) 可见光摄像传感器由二可变长焦自动聚焦镜头和高性能高清摄像机组成。
2) 转台:由方位座、俯仰包及支撑结构组成。
3) 陀螺伺服稳定系统:由直流力矩电机、直流测速电机、陀螺、旋转变压器等组成。
现场控制柜包括:主控机箱、伺服驱动器、低压电源等。
室内显控设备包括高性能工作站、轨迹球、专用的操控键盘(带操控杆),以及21寸液晶显示屏。
系统的组成原理框图如下图所示。
工作方式
(1) 单杆手动搜索方式
由操作人员手动操纵单杆,控制系统接收到操作员的操纵信息后,驱动指向器扫描搜索目标。
(2) 自动扇扫搜索方式
由操作人员设定一定的方位观察范围,自动对空搜索跟踪目标。
(3) 手动跟踪目标方式
操作人员在屏幕上发现可疑目标后,手动操纵单杆,控制系统接收操作人员的操纵信息,驱动指向器,使目标始终成像在光学系统视场中心部分。
(4) 自动跟踪目标方式
操作人员在屏幕上发现感兴趣的目标后,手动捕获目标,系统自动锁定目标进入自动跟踪状态。在目标运动过程中,不需进一步的操作干预,控制系统驱动精密轴系使目标始终成像在光学系统视场中心。
(5) 雷达引导方式
操作人员将系统设定为雷达导引工作状态后,可实时接收雷达发出的目标方位和仰角信息,光电系统根据雷达的目标指示信息进行自动搜索、锁定和跟踪指定目标。
自动跟踪原理
系统采用数字跟踪技术,通过采集视频图像信号、数字图像处理、目标识别,分离出目标信号和背景信息,获得被跟踪目标相对视轴的脱靶量。如果目标未处于视轴中心,则将脱靶量作为偏差量,经校正控制计算后驱动随动转台转动,使视轴趋于指向目标。本系统设计有两种跟踪处理算法,可以根据实际情况选择最佳的跟踪方式。

截屏,微信识别二维码
微信号:13510191430
(点击微信号复制,添加好友)
一体化机芯
电动变倍镜头
电动变焦镜头
国产一体化机芯
手动变倍镜头
红外相机
红外镜头
高清监控摄像机